在三维扫描领域,大凡光学为结构光系统、激光扫描系统及多视角重建系统提供高稳定性标定解决方案,构建精准空间模型基础,提升点云质量与建模精度。
在三维扫描领域,标定不是“辅助环节”,而是精度体系的起点,三维重建的真实性,源于空间几何关系的准确标定。(以下图片为示意图,不做专业参考,具体以专业标定场景为准)
AR/VR/MR设备

应用场景:头显设备、空间定位系统、眼动追踪系统等。
标定需求:多相机同步标定、空间坐标系统一、IMU融合标定等。
标定的意义:降低眩晕、提升定位稳定性、提升沉浸体验等。
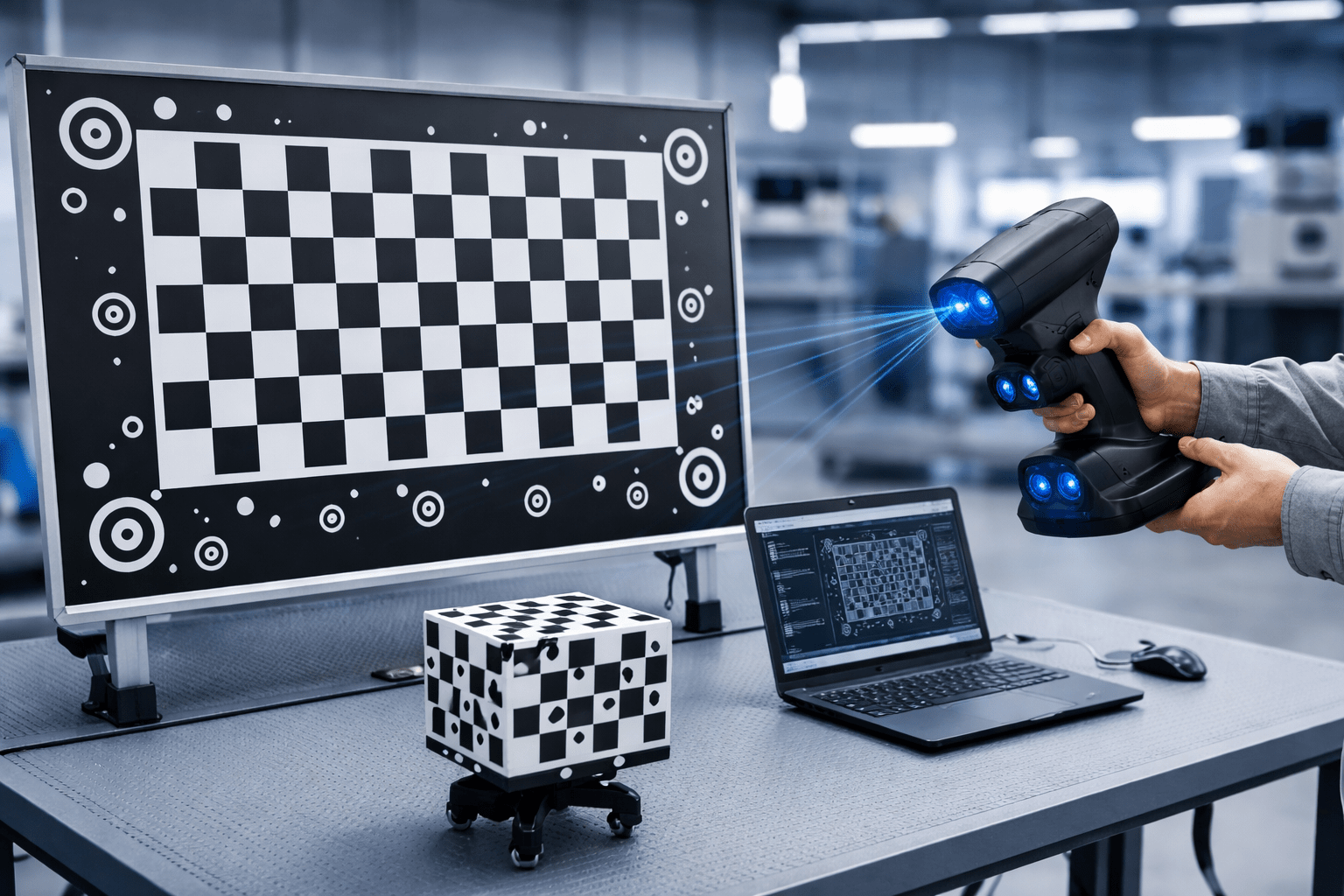
结构光三维扫描

应用场景:工业检测(模具检测、精密零部件尺寸测量)、逆向工程(产品数字建模、工业设计复制)、自动化产线检测(在线动态扫描、高速质量检测)等。
标定需求:相机内参标定、投影仪模型建立、相机-投影仪外参标定、三角测量几何优化、激光平面标定与激光-相机空间关系等。
双目/夺目视觉扫描
应用场景:手持扫描仪、多视角扫描系统等。
标定需求:相机内参标定、多相机外参标定、全局坐标统一等。
医疗三维扫描

应用场景:数字化义齿设计、牙体修复、骨科术前检查、整形规划、康复建模、义肢定制等。
标定需求:微小尺寸精度控制、畸变高精度补偿、多帧拼接稳定性、小视场高分辨率模型优化等。
文化遗产数字化

应用场景:文物修复建模、建筑遗址三维建模、文物复制与保护、数字博物馆等。
标定需求:相机内参标定、镜头畸变校正、像素与真实尺寸转换、高分辨率成像标定等。
建筑与BIM

应用场景:建筑数字化建模、施工进度检测、旧建筑改造、数字孪生城市等。
标定需求:相机内外参标定、全局坐标系统构建、点云拼接精度控制,畸变模型校正、多视角空间关系标定等。